編輯:關於Android編程
不少公司在開發android產品的時候,都需要在android中增加自己的service,尤其是定制的工業用途的設備,我們公司的項目中就涉及到要增加一個service,是一個北斗通信service,具體的內容不便透露,涉及到保密。但是增加service的過程大概能描述一下,具體代碼就按著不重要的來帖,大家見諒!!
其實增加自己的service不論是誰來,我想都會仿照現有service來做,在android現有service中,最簡單明了的是vibrator service,其次的是location service也就是GPS,這兩個service 雖然簡單,但是service的架構都是相同,我們仿照的目標就是要這樣,明了的架構,往裡面填東西就是體力活了。下面我們從下往上一一來看每個步驟。
1.kernel層
我們的硬件連接到設備上一個串口,因此kernel層我們就不用什麼改動。當然如果你們添加的硬件設備需要驅動的話,自己加進去就是了,這裡不多說了。
2.HAL層
我們先找到了GPS的HAL層代碼 \android\hardware\imx\libgps中一共兩個文件,仔細分析來看,這兩個文件主要功能是生成一個動態鏈接庫,向下與硬件通信,向上為系統提供訪問的接口函數,知道了這個,我們就明白了HAL層大概的功能,我們的工作就是選一個適合自己硬件的方法實現這個功能。
我們的硬件是一個串口通信的設備,無非就是可以由上層控制來發送命令和接受命令,因此我選的是串口通信很常見的方式: 每條發送命令都單獨寫一個函數,有上層來控制發送哪條。接收命令就啟動一個接收線程,每當收到數據後,進行一系列的判定,把有效的數據傳送到上層。
下面我們來看具體代碼在android\hardware\imx\librd目錄中:
首先是我們與硬件通信的幾個函數:
static const RDInterface goldtelrdInterface = {
sizeof(RDInterface),
goldtel_rd_init,
goldtel_rd_close,
goldtel_rd_send_XTZJ,
goldtel_rd_send_ICJC,
goldtel_rd_send_SJSC,
goldtel_rd_send_DWSQ,
goldtel_rd_send_BBDQ,
goldtel_rd_send_YHZL_SJTX,
goldtel_rd_send_TXSQ,
};static int goldtel_rd_init(RDCallbacks* callbacks)
{
RdState* s = _rd_state;
//lijianzhang
write_sysfs("/sys/devices/platform/bd_power/enable_rdss","1",1); //給設備上電
usleep(1500000);
if (!s->init)
rd_state_init(s, callbacks);//進行一系列的初始化 注意這裡的一個參數callbacks,
//這是一些回調函數,是在jni層實現的,傳到底層來運行
//android很多都是這麼來實現,如果以後看別的代碼看到
//類似方式就不要慌亂,去jni層裡肯定能找到
if (s->fd < 0)
return -1;
rd_state_start(s); //開始工作
return 0;
}static void
rd_state_init( RdState* state, RDCallbacks* callbacks )
{
.................
一系列初始化
。。。。。。。。。。。。。。。。。。。
state->thread = callbacks->create_thread_cb( "rd_state_thread", rd_state_thread, state );//這個函數裡最主要的功能就是創建接收線程
。。。。。。。。。。。。。。。。。。。
。。。。。。。。。。。。。。。。。。。
}
下面來看接收線程裡的東西:static void
rd_state_thread( void* arg )
{
RdState* state = (RdState*) arg;
NmeaReader reader[1];
int epoll_fd = epoll_create(2);
int started = 0;
int rd_fd = state->fd;
int control_fd = state->control[1];
nmea_reader_init( reader );
// 注冊epoll 文件
epoll_register( epoll_fd, control_fd );
epoll_register( epoll_fd, rd_fd );
LOGE("RD thread running");
// now loop
for (;;) {
struct epoll_event events[2];
int ne, nevents;
nevents = epoll_wait( epoll_fd, events, 2, -1 ); //等待epoll消息
if (nevents < 0) {
if (errno != EINTR)
E("epoll_wait() unexpected error: %s", strerror(errno));
continue;
}
D("rd thread received %d events", nevents);
for (ne = 0; ne < nevents; ne++) { //處理每條消息
if ((events[ne].events & (EPOLLERR|EPOLLHUP)) != 0) {
E("EPOLLERR or EPOLLHUP after epoll_wait() !?");
return;
}
if ((events[ne].events & EPOLLIN) != 0) {
int fd = events[ne].data.fd;
if (fd == control_fd) //如果這個消息是控制命令的話,這裡的控制命令其實就兩條,
//服務開始和服務結束,下面就是分別對著兩條命令進行處理
{
char cmd = 255;
int ret;
D("rd control fd event");
do {
ret = read( fd, &cmd, 1 );
} while (ret < 0 && errno == EINTR);
if (cmd == CMD_QUIT) { //服務退出
if (started) {
started = 0;
nmea_reader_set_DWXX_callback(reader,NULL);
nmea_reader_set_BBXX_callback(reader,NULL);
nmea_reader_set_FKXX_callback(reader,NULL);
nmea_reader_set_ICXX_callback(reader,NULL);
nmea_reader_set_ZJXX_callback(reader,NULL);
nmea_reader_set_TXHZ_callback(reader,NULL);
nmea_reader_set_TXXX_callback(reader,NULL);
}
return;
}
else if (cmd == CMD_START) { //服務開始
if (!started) {
LOGE("rd_state_thread start!");
started = 1;
nmea_reader_set_DWXX_callback(reader,state->callbacks.dwxx_cb);
nmea_reader_set_BBXX_callback(reader,state->callbacks.bbxx_cb);
nmea_reader_set_FKXX_callback(reader,state->callbacks.fkxx_cb);
nmea_reader_set_ICXX_callback(reader,state->callbacks.icxx_cb);
nmea_reader_set_ZJXX_callback(reader,state->callbacks.zjxx_cb);
nmea_reader_set_TXHZ_callback(reader,state->callbacks.txhz_cb);
nmea_reader_set_TXXX_callback(reader,state->callbacks.txxx_cb);
}
}
}
else if (fd == rd_fd) //如果是串口通信的消息
{
// LOGE("start read data");
char buff[32];
for (;;) {
int nn, ret;
ret = read( fd, buff, sizeof(buff) ); //從串口中讀出數據
if (ret < 0) {
if (errno == EINTR)
continue;
if (errno != EWOULDBLOCK)
E("error while reading from gps daemon socket: %s:", strerror(errno));
break;
}
for (nn = 0; nn < ret; nn++)
{
//LOGE("start read data %02X",buff[nn]);
nmea_reader_addc( reader, buff[nn] ); //判定數據有效性並進行處理
}
}
}
else
{
E("epoll_wait() returned unkown fd %d ?", fd);
}
}
}
}
}
進程創建完成了,hal層基本功能就完成了,下一步就是將這些功能聲稱一個.so動態鏈接庫,方法就是下面的代碼:
static const RDInterface* get_rd_hardware_interface()
{
return &goldtelrdInterface;
}
static int open_rd(const struct hw_module_t* module, char const* name,
struct hw_device_t** device)
{
struct rd_device_t *dev = malloc(sizeof(struct rd_device_t));
memset(dev, 0, sizeof(*dev));
dev->common.tag = HARDWARE_DEVICE_TAG;
dev->common.version = 0;
dev->common.module = (struct hw_module_t*)module;
dev->get_rd_interface = get_rd_hardware_interface;
*device = (struct hw_device_t*)dev;
return 0;
}
static struct hw_module_methods_t rd_module_methods = {
.open = open_rd
};
const struct hw_module_t HAL_MODULE_INFO_SYM = {
.tag = HARDWARE_MODULE_TAG,
.version_major = 1,
.version_minor = 0,
.id = RD_HARDWARE_MODULE_ID,
.name = "Real6410 rd Module",
.author = "The Android Open Source Project",
.methods = &rd_module_methods,
};動態鏈接庫生成完了,下面就到了framework層,我們找到了location service的代碼在目錄\android\frameworks\base\services\jni\中功能就是打開這個動態鏈接庫然後,向java層提供函數接口,功能很簡單我們直接來看我寫的代碼在android\\frameworks\base\services\jni\com_android_server_rdmessage_RDMessageDispatch.cpp中
首先是打開動態鏈接庫
static const RDInterface* get_rd_interface() {
int err;
hw_module_t* module;
const RDInterface* interface = NULL;
err = hw_get_module(RD_HARDWARE_MODULE_ID, (hw_module_t const**)&module);
if (err == 0) {
hw_device_t* device;
err = module->methods->open(module, RD_HARDWARE_MODULE_ID, &device);
if (err == 0) {
rd_device_t* rd_device = (rd_device_t *)device;
interface = rd_device->get_rd_interface(rd_device);
}
}
return interface;
}最後的是想上層提供的函數接口
static JNINativeMethod sMethods[] = {
/* name, signature, funcPtr */
{"class_init_native", "()V", (void *)android_rdmessage_RDMessageDispatch_class_init_native},
{"native_is_supported","()Z",(void*)android_rdmessage_RDMessageDispatch_is_supported},
{"native_BDMessage_start", "()Z", (void*)android_rdmessage_RDMessageDispatch_native_BDMessage_start},
{"native_close","()V",(void*)android_rdmessage_RDMessageDispatch_native_close},
{"native_sendXTZJ", "(I)Z", (void*)android_rdmessage_RDMessageDispatch_native_sendXTZJ},
{"native_sendICJC", "()Z", (void*)android_rdmessage_RDMessageDispatch_native_sendICJC},
{"native_sendSJSC", "(I)Z", (void*)android_rdmessage_RDMessageDispatch_native_sendSJSC},
{"native_sendDWSQ", "(ZZ)Z", (void*)android_rdmessage_RDMessageDispatch_native_sendDWSQ},
{"native_sendBBDQ", "()Z", (void*)android_rdmessage_RDMessageDispatch_native_sendBBDQ},
{"native_sendYHZL_SJTX", "(II)Z", (void*)android_rdmessage_RDMessageDispatch_native_sendYHZL_SJTX},
{"native_SendBDMessage", "(I[BIIZ)Z", (void*)android_rdmessage_RDMessageDispatch_native_SendBDMessage},
{"read_TXXX_message", "([BI)I", (void*)android_rdmessage_RDMessageDispatch_read_TXXX_message},
{"read_DWXX_message","([B[B[B[B[B)V",(void*)android_rdmessage_RDMessageDispatch__read_DWXX_message},
};中間就是實現這兩者之間的轉換,我們來說轉換過程中比較重要的幾點首先是發送命令,很簡單,就是直接調用動態鏈接庫中提供的發送函數,看代碼static jboolean android_rdmessage_RDMessageDispatch_native_sendICJC
(JNIEnv *env, jobject obj)
{
if (!sRdInterface)
return false;
if(sRdInterface->rd_send_ICJC()!=0)
return false;
return true;
} static void ZJXX_callback(ZJXXInfo *zjxx)
{
JNIEnv* env = AndroidRuntime::getJNIEnv();
env->CallVoidMethod(mCallbacksObj,method_reportZJXX,zjxx->UserId,zjxx->ICStatus,
zjxx->YJStatus,zjxx->DCStatus,zjxx->RZStatus,zjxx->bs1Status,zjxx->bs2Status,
zjxx->bs3Status,zjxx->bs4Status,zjxx->bs5Status,zjxx->bs6Status);
checkAndClearExceptionFromCallback(env, __FUNCTION__);
}4. framework層
我們看到location service的代碼在android\frameworks\base\services\java\com\android\server\LocationManagerService.java
android\frameworks\base\services\java\com\android\server\location目錄 android\\frameworks\base\location\java\android\location目錄中
分析一下架構,就是向下接口JNI層的 代碼,在此基礎上封裝service實現函數,最後在servicemanager中運行這個服務,還有增加這個服務的aidl文件,以便於所有的app都能訪問到。所以我們所做的工作也是這些,其實比較簡單,主要是為界面提供支持,比如更新狀態欄北斗信號強度等等,這裡就不再貼代碼了,大家可以自己看gps是怎麼做的仿照來就行。
實現了這些函數最後要在android\frameworks\base\services\java\com\android\server\SystemServer.java中增加
try { //啟動這個service
Slog.i(TAG, "RdMessage Manager");
rdmessage = new RdMessageManagerService(context);
ServiceManager.addService(Context.RD_MESSAGE_SERVICE, rdmessage);
} catch (Throwable e) {
reportWtf("starting RdMessage Manager", e);
}
try {
if (rdmessageF != null) rdmessageF.systemReady(); //告訴系統服務啟動完成
} catch (Throwable e) {
reportWtf("making RdMessage Service ready", e);
}到了這裡整個service添加就完成了,我們就可以通過app來訪問這個service了。
 Android 最火的快速開發框架androidannotations配置詳解
Android 最火的快速開發框架androidannotations配置詳解
以前給大家介紹的xUtils是國內比較火的快速開發框架,但是它的注解機制不是太穩定而且注解可選也比較少,今天給大家介紹一個國外的一個框架主要專注於注解的開發,簡化Andr
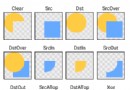 Android基礎入門教程——8.3.4 Paint API之—— Xfermode與PorterDuff詳解(一)
Android基礎入門教程——8.3.4 Paint API之—— Xfermode與PorterDuff詳解(一)
本節引言: 不知道標題這兩個玩意你熟不熟悉啦,如果自己實現過圓角或者圓形圖片,相信對這兩個名詞 並不模式,一時半伙沒想起來?沒關系,下面這個圖你可曾見過?
 Android開發之使用HTTP訪問網絡資源
Android開發之使用HTTP訪問網絡資源
使用HTTP訪問網絡資源 前面介紹了 URLConnection己經可以非常方便地與指定站點交換信息,URLConnection還有一個子類:HttpURL
 Android最新版本開發環境搭建圖文教程
Android最新版本開發環境搭建圖文教程
本文只是寫了如何配置JDK,以及adt-bundle的配置。對於以前的adt-bundle的版本,會自帶CPU/ABI系統鏡像,經過本文所描述的兩個步驟後可以直接創建AV
 【React Native開發】React Native控件之DrawerLayoutAndroid抽屜導航切換組件講解(13)
【React Native開發】React Native控件之DrawerLayoutAndroid抽屜導航切換組件講解(13)
(一)前言今天我們一起來看一下抽屜DrawerLayoutAndroid