編輯:關於Android編程
前面寫了兩個博文,一個是Android下,一個是Linux下led控制,但是Linux下那個寫的有很多漏洞和不清楚的地方。這裡寫一篇作為補充,也是我在學習中理解的深入。當然這個可能也會有很多漏洞,如果我有更深入的了解,繼續進行補充。我的開發板是全志科技的CQA83T,成都啟劃公司出的擴展板。
先貼出來驅動源程序的代碼,此代碼的位置在lichee\linux-3.4\drivers\char\led.c:
#include#include #include #include #include #include #include #include #include #include #include #include #include #include #include #include #include #include #include #define LED_IOCTL_SET_ON 1 #define LED_IOCTL_SET_OFF 0 static script_item_u led_val[5]; static script_item_value_type_e led_type; static struct semaphore lock; //led_open static int led_open(struct inode *inode, struct file *file) { if (!down_trylock(&lock)) return 0; else return -EBUSY; } //led_close static int led_close(struct inode *inode, struct file *file) { up(&lock); return 0; } //led_ioctl static long led_ioctl(struct file *filep, unsigned int cmd, unsigned long arg) { unsigned int n; n = (unsigned int)arg; switch (cmd) { case LED_IOCTL_SET_ON: if (n < 1) return -EINVAL; if(led_val[n-1].gpio.gpio != -1) { __gpio_set_value(led_val[n-1].gpio.gpio, 1); printk("led%d on !\n", n); } break; case LED_IOCTL_SET_OFF: default: if (n < 1) return -EINVAL; if(led_val[n-1].gpio.gpio != -1) { __gpio_set_value(led_val[n-1].gpio.gpio, 0); printk("led%d off !\n", n); } break; } return 0; } //led_gpio static int __devinit led_gpio(void) { int i = 0; char gpio_num[10]; for(i =1 ; i < 6; i++) { sprintf(gpio_num, "led_gpio%d", i); led_type= script_get_item("led_para", gpio_num, &led_val[i-1]); if(SCIRPT_ITEM_VALUE_TYPE_PIO != led_type) { printk("led_gpio type fail !"); // gpio_free(led_val[i-1].gpio.gpio); led_val[i-1].gpio.gpio = -1; continue; } if(0 != gpio_request(led_val[i-1].gpio.gpio, NULL)) { printk("led_gpio gpio_request fail !"); led_val[i-1].gpio.gpio = -1; continue; } if (0 != gpio_direction_output(led_val[i-1].gpio.gpio, 0)) { printk("led_gpio gpio_direction_output fail !"); // gpio_free(led_val[i-1].gpio.gpio); led_val[i-1].gpio.gpio = -1; continue; } } return 0; } //file_operations static struct file_operations leds_ops = { .owner = THIS_MODULE, .open = led_open, .release = led_close, .unlocked_ioctl = led_ioctl, }; //miscdevice static struct miscdevice leds_dev = { .minor = MISC_DYNAMIC_MINOR, .name = "led", .fops = &leds_ops, }; //led_remove static int __devexit led_remove(struct platform_device *pdev) { return 0; } //led_probe static int __devinit led_probe(struct platform_device *pdev) { int led_used; script_item_u val; script_item_value_type_e type; int err; printk("led_para!\n"); type = script_get_item("led_para", "led_used", &val); if (SCIRPT_ITEM_VALUE_TYPE_INT != type) { printk("%s script_get_item \"led_para\" led_used = %d\n", __FUNCTION__, val.val); return -1; } led_used = val.val; printk("%s script_get_item \"led_para\" led_used = %d\n", __FUNCTION__, val.val); if(!led_used) { printk("%s led_used is not used in config, led_used=%d\n", __FUNCTION__,led_used); return -1; } err = led_gpio(); if (err) return -1; sema_init(&lock, 1); err = misc_register(&leds_dev); printk("======= cqa83 led initialized ================\n"); return err; } //platform_device struct platform_device led_device = { .name = "led", }; //platform_driver static struct platform_driver led_driver = { .probe = led_probe, .remove = __devexit_p(led_remove), .driver = { .name = "led", .owner = THIS_MODULE, }, }; //led_init static int __init led_init(void) { if (platform_device_register(&led_device)) { printk("%s: register gpio device failed\n", __func__); } if (platform_driver_register(&led_driver)) { printk("%s: register gpio driver failed\n", __func__); } return 0; } //led_exit static void __exit led_exit(void) { platform_driver_unregister(&led_driver); } module_init(led_init); module_exit(led_exit); MODULE_DESCRIPTION("Led Driver"); MODULE_LICENSE("GPL v2");
1、這是一個Linux驅動程序,一個字符驅動,一個雜項字符驅動。從err = misc_register(&leds_dev);可以知道是雜項字符驅動。
2、這裡使用到了Linux的GPIO驅動模型。
3、這個驅動是基於platform機制的。
第一,我們先說一說platform機制。
platform機制是Linux2.6引入的一套新的驅動管理和注冊機制,Linux大部分設備驅動中都能使用這套機制。platform是一種虛擬總線,主要用來管理CPU的片上資源具有很好的移植性。platform機制本身的使用並不復雜,由platform_device(總是設備)和platform_driver(總線驅動)兩部分組成,設備用platform_device表示,驅動用platform_driver注冊。系統首先會初始化platform總線,當platform設備想要掛載到總線上時,定義platform_device和platform_driver,然後使用函數platform_device_register注冊platform_device,再使用platform_driver_register函數注冊platform_driver驅動,這裡要記住,platform_device_register它一定要在platform_driver_register之前。也就是一定要先注冊設備再注冊驅動,因為在驅動注冊是,要先查找與之對應的設備,如果能夠找到並匹配成功才能注冊驅動。具體細節下面會分析。
下面,我們來說一下platform總線,platform總線相關的代碼都在內核linux-3.4\drivers\base\platform.c裡面。既然platform總線是在內核啟動時初始化,那麼先列出初始化函數的調用過程,asmlinkagevoid __init start_kernel(void)[linux-3.4\init\main.c] -->static noinline void __init_refok rest_init(void)[linux-3.4\init\main.c] -->static int __init kernel_init(void * unused)[linux-3.4\init\main.c] -->static void __init do_basic_setup(void) [linux-3.4\init\main.c]-->void __init driver_init(void) [linux-3.4\drivers\base\init.c]-->int __init platform_bus_init(void) [linux-3.4\drivers\base\platform.c] ,中括號裡是文件位置,函數platform_bus_init就是platform的總線初始化函數。
來看platform總線初始化函數platform_bus_init,位於linux-3.4\drivers\base\platform.c中:
int __init platform_bus_init(void)
{
int error;
early_platform_cleanup();
error = device_register(&platform_bus);
if (error)
return error;
error = bus_register(&platform_bus_type);
if (error)
device_unregister(&platform_bus);
return error;
}
按圖索骥,繼續深入platform總線初始化函數來看early_platform_cleanup函數,這個函數從名字上就可以看出是一個清理函數。我們來看一下這個函數的源碼,位於linux-3.4\drivers\base\platform.c中:
/**
* early_platform_cleanup - clean up early platform code
*/
void __init early_platform_cleanup(void)
{
struct platform_device *pd, *pd2;
/* clean up the devres list used to chain devices */
list_for_each_entry_safe(pd, pd2, &early_platform_device_list,
dev.devres_head) {
list_del(&pd->dev.devres_head);
memset(&pd->dev.devres_head, 0, sizeof(pd->dev.devres_head));
}
}
從注釋可以看出,這個函數是清除早期的platform設備鏈表,list_for_each_entry_safe的作用是遍歷先前的platform設備鏈表early_platform_device_list
下面繼續platform總線初始化函數中的device_register(&platform_bus)的函數,該函數是將platform總線作為設備進行注冊。我們先看參數plat_bus,位於linux-3.4\drivers\base\platform.c中:
struct device platform_bus = {
.init_name = "platform",
};
EXPORT_SYMBOL_GPL(platform_bus);
參數platform_bus是一個device類型的結構體,下面EXPORT_SYMBOL_GPL是宏,這個宏說明其參數所指向的函數只給有GPL認證的模塊使用。下面來看一下device結構體,位於linux-3.4\include\linux\device.h中:
struct device {
struct device *parent;
struct device_private *p;
struct kobject kobj;
const char *init_name; /* initial name of the device */
const struct device_type *type;
struct mutex mutex; /* mutex to synchronize calls to
* its driver.
*/
struct bus_type *bus; /* type of bus device is on */
struct device_driver *driver; /* which driver has allocated this
device */
void *platform_data; /* Platform specific data, device
core doesn't touch it */
struct dev_pm_info power;
struct dev_pm_domain *pm_domain;
#ifdef CONFIG_NUMA
int numa_node; /* NUMA node this device is close to */
#endif
u64 *dma_mask; /* dma mask (if dma'able device) */
u64 coherent_dma_mask;/* Like dma_mask, but for
alloc_coherent mappings as
not all hardware supports
64 bit addresses for consistent
allocations such descriptors. */
struct device_dma_parameters *dma_parms;
struct list_head dma_pools; /* dma pools (if dma'ble) */
struct dma_coherent_mem *dma_mem; /* internal for coherent mem
override */
#ifdef CONFIG_CMA
struct cma *cma_area; /* contiguous memory area for dma
allocations */
#endif
/* arch specific additions */
struct dev_archdata archdata;
struct device_node *of_node; /* associated device tree node */
dev_t devt; /* dev_t, creates the sysfs "dev" */
u32 id; /* device instance */
spinlock_t devres_lock;
struct list_head devres_head;
struct klist_node knode_class;
struct class *class;
const struct attribute_group **groups; /* optional groups */
void (*release)(struct device *dev);
};
int device_register(struct device *dev)
{
device_initialize(dev);
return device_add(dev);
}
這個函數作用是向系統注冊一個設備,它首先使用函數device_initialize對設備進行初始化,然後使用device_add添加設備。下面分別來看一下這倆函數,但這裡不做解釋,這倆函數都是位於linux-3.4\drivers\base\core.c中:
void device_initialize(struct device *dev)
{
dev->kobj.kset = devices_kset;
kobject_init(&dev->kobj, &device_ktype);
INIT_LIST_HEAD(&dev->dma_pools);
mutex_init(&dev->mutex);
lockdep_set_novalidate_class(&dev->mutex);
spin_lock_init(&dev->devres_lock);
INIT_LIST_HEAD(&dev->devres_head);
device_pm_init(dev);
set_dev_node(dev, -1);
}
int device_add(struct device *dev)
{
struct device *parent = NULL;
struct kobject *kobj;
struct class_interface *class_intf;
int error = -EINVAL;
dev = get_device(dev);
if (!dev)
goto done;
if (!dev->p) {
error = device_private_init(dev);
if (error)
goto done;
}
/*
* for statically allocated devices, which should all be converted
* some day, we need to initialize the name. We prevent reading back
* the name, and force the use of dev_name()
*/
if (dev->init_name) {
dev_set_name(dev, "%s", dev->init_name);
dev->init_name = NULL;
}
/* subsystems can specify simple device enumeration */
if (!dev_name(dev) && dev->bus && dev->bus->dev_name)
dev_set_name(dev, "%s%u", dev->bus->dev_name, dev->id);
if (!dev_name(dev)) {
error = -EINVAL;
goto name_error;
}
pr_debug("device: '%s': %s\n", dev_name(dev), __func__);
parent = get_device(dev->parent);
kobj = get_device_parent(dev, parent);
if (kobj)
dev->kobj.parent = kobj;
/* use parent numa_node */
if (parent)
set_dev_node(dev, dev_to_node(parent));
/* first, register with generic layer. */
/* we require the name to be set before, and pass NULL */
error = kobject_add(&dev->kobj, dev->kobj.parent, NULL);
if (error)
goto Error;
/* notify platform of device entry */
if (platform_notify)
platform_notify(dev);
error = device_create_file(dev, &uevent_attr);
if (error)
goto attrError;
if (MAJOR(dev->devt)) {
error = device_create_file(dev, &devt_attr);
if (error)
goto ueventattrError;
error = device_create_sys_dev_entry(dev);
if (error)
goto devtattrError;
devtmpfs_create_node(dev);
}
error = device_add_class_symlinks(dev);
if (error)
goto SymlinkError;
error = device_add_attrs(dev);
if (error)
goto AttrsError;
error = bus_add_device(dev);
if (error)
goto BusError;
error = dpm_sysfs_add(dev);
if (error)
goto DPMError;
device_pm_add(dev);
/* Notify clients of device addition. This call must come
* after dpm_sysfs_add() and before kobject_uevent().
*/
if (dev->bus)
blocking_notifier_call_chain(&dev->bus->p->bus_notifier,
BUS_NOTIFY_ADD_DEVICE, dev);
kobject_uevent(&dev->kobj, KOBJ_ADD);
bus_probe_device(dev);
if (parent)
klist_add_tail(&dev->p->knode_parent,
&parent->p->klist_children);
if (dev->class) {
mutex_lock(&dev->class->p->mutex);
/* tie the class to the device */
klist_add_tail(&dev->knode_class,
&dev->class->p->klist_devices);
/* notify any interfaces that the device is here */
list_for_each_entry(class_intf,
&dev->class->p->interfaces, node)
if (class_intf->add_dev)
class_intf->add_dev(dev, class_intf);
mutex_unlock(&dev->class->p->mutex);
}
done:
put_device(dev);
return error;
DPMError:
bus_remove_device(dev);
BusError:
device_remove_attrs(dev);
AttrsError:
device_remove_class_symlinks(dev);
SymlinkError:
if (MAJOR(dev->devt))
devtmpfs_delete_node(dev);
if (MAJOR(dev->devt))
device_remove_sys_dev_entry(dev);
devtattrError:
if (MAJOR(dev->devt))
device_remove_file(dev, &devt_attr);
ueventattrError:
device_remove_file(dev, &uevent_attr);
attrError:
kobject_uevent(&dev->kobj, KOBJ_REMOVE);
kobject_del(&dev->kobj);
Error:
cleanup_device_parent(dev);
if (parent)
put_device(parent);
name_error:
kfree(dev->p);
dev->p = NULL;
goto done;
}
下面我們繼續回到platform總線初始化函數platform_bus_init中,來看總線注冊函數bus_register(&platform_bus_type),先看一下參數platfor_bus_type,位於linux-3.4\drivers\base\platform.c中:
struct bus_type platform_bus_type = {
.name = "platform",
.dev_attrs = platform_dev_attrs,
.match = platform_match,
.uevent = platform_uevent,
.pm = &platform_dev_pm_ops,
};
EXPORT_SYMBOL_GPL(platform_bus_type);
struct bus_type {
const char *name;
const char *dev_name;
struct device *dev_root;
struct bus_attribute *bus_attrs;
struct device_attribute *dev_attrs;
struct driver_attribute *drv_attrs;
int (*match)(struct device *dev, struct device_driver *drv);
int (*uevent)(struct device *dev, struct kobj_uevent_env *env);
int (*probe)(struct device *dev);
int (*remove)(struct device *dev);
void (*shutdown)(struct device *dev);
int (*suspend)(struct device *dev, pm_message_t state);
int (*resume)(struct device *dev);
const struct dev_pm_ops *pm;
struct iommu_ops *iommu_ops;
struct subsys_private *p;
};
這是一個設備總線類型結構體,成員變量指出了總線名稱,子設備前綴名(像"foo%u", dev->id),被用作父設備的默認設備,總線屬性,設備屬性,驅動屬性以及一些回調函數。下面來看一下總線注冊函數bus_register,位於linux-3.4\include\linux\device.h中,這是一個宏定義:
/* This is a #define to keep the compiler from merging different
* instances of the __key variable */
#define bus_register(subsys) \
({ \
static struct lock_class_key __key; \
__bus_register(subsys, &__key); \
})
int __bus_register(struct bus_type *bus, struct lock_class_key *key)
{
int retval;
struct subsys_private *priv;
priv = kzalloc(sizeof(struct subsys_private), GFP_KERNEL);
if (!priv)
return -ENOMEM;
priv->bus = bus;
bus->p = priv;
BLOCKING_INIT_NOTIFIER_HEAD(&priv->bus_notifier);
retval = kobject_set_name(&priv->subsys.kobj, "%s", bus->name);
if (retval)
goto out;
priv->subsys.kobj.kset = bus_kset;
priv->subsys.kobj.ktype = &bus_ktype;
priv->drivers_autoprobe = 1;
retval = kset_register(&priv->subsys);
if (retval)
goto out;
retval = bus_create_file(bus, &bus_attr_uevent);
if (retval)
goto bus_uevent_fail;
priv->devices_kset = kset_create_and_add("devices", NULL,
&priv->subsys.kobj);
if (!priv->devices_kset) {
retval = -ENOMEM;
goto bus_devices_fail;
}
priv->drivers_kset = kset_create_and_add("drivers", NULL,
&priv->subsys.kobj);
if (!priv->drivers_kset) {
retval = -ENOMEM;
goto bus_drivers_fail;
}
INIT_LIST_HEAD(&priv->interfaces);
__mutex_init(&priv->mutex, "subsys mutex", key);
klist_init(&priv->klist_devices, klist_devices_get, klist_devices_put);
klist_init(&priv->klist_drivers, NULL, NULL);
retval = add_probe_files(bus);
if (retval)
goto bus_probe_files_fail;
retval = bus_add_attrs(bus);
if (retval)
goto bus_attrs_fail;
pr_debug("bus: '%s': registered\n", bus->name);
return 0;
bus_attrs_fail:
remove_probe_files(bus);
bus_probe_files_fail:
kset_unregister(bus->p->drivers_kset);
bus_drivers_fail:
kset_unregister(bus->p->devices_kset);
bus_devices_fail:
bus_remove_file(bus, &bus_attr_uevent);
bus_uevent_fail:
kset_unregister(&bus->p->subsys);
out:
kfree(bus->p);
bus->p = NULL;
return retval;
}
EXPORT_SYMBOL_GPL(__bus_register);
這個函數進行了返回檢測,如果注冊識別,則進行與注冊相反的操作注銷device_unregister。這個函數位於linux-3.4\drivers\base\core.c中:
/**
* device_unregister - unregister device from system.
* @dev: device going away.
*
* We do this in two parts, like we do device_register(). First,
* we remove it from all the subsystems with device_del(), then
* we decrement the reference count via put_device(). If that
* is the final reference count, the device will be cleaned up
* via device_release() above. Otherwise, the structure will
* stick around until the final reference to the device is dropped.
*/
void device_unregister(struct device *dev)
{
pr_debug("device: '%s': %s\n", dev_name(dev), __func__);
device_del(dev);
put_device(dev);
}
到這裡呢,platform總線初始化就結束了,沒有做更多的解釋,主要原因是我也在學習,還有就是每個函數的作用無論是見名知意還是查看函數說明,這個函數的功能是很明確的。
現在呢,platform總線已經初始化完成,下面就是把platform設備和驅動掛載到platform總線上了。
現在我們還是回到開始led驅動函數led.c中,了解過驅動的人都知道,驅動被加載到內核第一次被調用的函數就是其初始化函數,在led.c中:
module_init(led_init);初始化函數led_init的源碼再寫一遍,如下:
static int __init led_init(void)
{
if (platform_device_register(&led_device)) {
printk("%s: register gpio device failed\n", __func__);
}
if (platform_driver_register(&led_driver)) {
printk("%s: register gpio driver failed\n", __func__);
}
return 0;
}
struct platform_device led_device = {
.name = "led",
};
struct platform_device {
const char * name;//設備名
int id;//設備id
struct device dev;//包含設備結構體
u32 num_resources;//資源個數
struct resource * resource;//資源結構體
const struct platform_device_id *id_entry;
/* MFD cell pointer */
struct mfd_cell *mfd_cell;
/* arch specific additions */
struct pdev_archdata archdata;
};
struct resource {
resource_size_t start;//資源起始地址
resource_size_t end;//資源結束地址
const char *name;//定義資源名稱
unsigned long flags;//定義資源類型
struct resource *parent, *sibling, *child;//資源樹
};
platform_device結構體包含了device結構體,device結構體描述了設備的詳細情況,在面向對象編程中device是所有設備的基類。device結構體在platform總線初始化的時候已經說過了,這裡就不說了。
然後我們來看一下platform_device_register 函數,其位於linux-3.4\drivers\base\platform.c中:
/**
* platform_device_register - add a platform-level device
* @pdev: platform device we're adding
*/
int platform_device_register(struct platform_device *pdev)
{
device_initialize(&pdev->dev);
arch_setup_pdev_archdata(pdev);
return platform_device_add(pdev);
}
EXPORT_SYMBOL_GPL(platform_device_register);
這裡首先對設備使用函數device_initalize進行初始化,這個函數在上面platform總線初始化的時候已經說過,這裡不說了。在這是不是可以發散一下,只要設備注冊進內核,無論是總線設備也好,其他設備也好,內核都把他們看成設備,使用同樣的方式初始化。
然後使用arch_setup_pdev_archdata(pdev),這個函數位於linux-3.4\drivers\base\platform.c中:
/**
* arch_setup_pdev_archdata - Allow manipulation of archdata before its used
* @pdev: platform device
*
* This is called before platform_device_add() such that any pdev_archdata may
* be setup before the platform_notifier is called. So if a user needs to
* manipulate any relevant information in the pdev_archdata they can do:
*
* platform_devic_alloc()
* ... manipulate ...
* platform_device_add()
*
* And if they don't care they can just call platform_device_register() and
* everything will just work out.
*/
void __weak arch_setup_pdev_archdata(struct platform_device *pdev)
{
}
/**
* platform_device_add - add a platform device to device hierarchy
* @pdev: platform device we're adding
*
* This is part 2 of platform_device_register(), though may be called
* separately _iff_ pdev was allocated by platform_device_alloc().
*/
int platform_device_add(struct platform_device *pdev)
{
int i, ret = 0;
if (!pdev)
return -EINVAL;
if (!pdev->dev.parent)
pdev->dev.parent = &platform_bus;
pdev->dev.bus = &platform_bus_type;
if (pdev->id != -1)
dev_set_name(&pdev->dev, "%s.%d", pdev->name, pdev->id);
else
dev_set_name(&pdev->dev, "%s", pdev->name);
for (i = 0; i < pdev->num_resources; i++) {
struct resource *p, *r = &pdev->resource[i];
if (r->name == NULL)
r->name = dev_name(&pdev->dev);
p = r->parent;
if (!p) {
if (resource_type(r) == IORESOURCE_MEM)
p = &iomem_resource;
else if (resource_type(r) == IORESOURCE_IO)
p = &ioport_resource;
}
if (p && insert_resource(p, r)) {
printk(KERN_ERR
"%s: failed to claim resource %d\n",
dev_name(&pdev->dev), i);
ret = -EBUSY;
goto failed;
}
}
pr_debug("Registering platform device '%s'. Parent at %s\n",
dev_name(&pdev->dev), dev_name(pdev->dev.parent));
ret = device_add(&pdev->dev);
if (ret == 0)
return ret;
failed:
while (--i >= 0) {
struct resource *r = &pdev->resource[i];
unsigned long type = resource_type(r);
if (type == IORESOURCE_MEM || type == IORESOURCE_IO)
release_resource(r);
}
return ret;
}
EXPORT_SYMBOL_GPL(platform_device_add);
下面我們回到led_init函數繼續往下看驅動注冊函數platform_driver_register(&led_driver),還是先看參數led_driver:
static struct platform_driver led_driver = {
.probe = led_probe,
.remove = __devexit_p(led_remove),
.driver = {
.name = "led",
.owner = THIS_MODULE,
},
};
struct platform_driver {
int (*probe)(struct platform_device *);
int (*remove)(struct platform_device *);
void (*shutdown)(struct platform_device *);
int (*suspend)(struct platform_device *, pm_message_t state);
int (*resume)(struct platform_device *);
struct device_driver driver;
const struct platform_device_id *id_table;
};
該結構體主要包含了設備操作的一些函數,並且包含了device_driver結構體,用面向對象的思想說明platform_driver繼承了device_driver結構體。也即是device_driver結構體派生了platform_driver結構體,device_driver是platform_driver的基類。結構體device_driver位於linux-3.4\include\linux中:
struct device_driver {
const char *name;
struct bus_type *bus;
struct module *owner;
const char *mod_name; /* used for built-in modules */
bool suppress_bind_attrs; /* disables bind/unbind via sysfs */
const struct of_device_id *of_match_table;
int (*probe) (struct device *dev);
int (*remove) (struct device *dev);
void (*shutdown) (struct device *dev);
int (*suspend) (struct device *dev, pm_message_t state);
int (*resume) (struct device *dev);
const struct attribute_group **groups;
const struct dev_pm_ops *pm;
struct driver_private *p;
};
該結構體包含了設備驅動的相關數據,比如設備驅動名稱,總線類型,擁有者,操作函數等等。
我們接下來看platform設備驅動注冊函數platform_driver_register,該函數位於linux-3.4\drivers\base\platform.c中:
/**
* platform_driver_register - register a driver for platform-level devices
* @drv: platform driver structure
*/
int platform_driver_register(struct platform_driver *drv)
{
drv->driver.bus = &platform_bus_type;
if (drv->probe)
drv->driver.probe = platform_drv_probe;
if (drv->remove)
drv->driver.remove = platform_drv_remove;
if (drv->shutdown)
drv->driver.shutdown = platform_drv_shutdown;
return driver_register(&drv->driver);
}
EXPORT_SYMBOL_GPL(platform_driver_register);
/**
* driver_register - register driver with bus
* @drv: driver to register
*
* We pass off most of the work to the bus_add_driver() call,
* since most of the things we have to do deal with the bus
* structures.
*/
int driver_register(struct device_driver *drv)
{
int ret;
struct device_driver *other;
BUG_ON(!drv->bus->p);
if ((drv->bus->probe && drv->probe) ||
(drv->bus->remove && drv->remove) ||
(drv->bus->shutdown && drv->shutdown))
printk(KERN_WARNING "Driver '%s' needs updating - please use "
"bus_type methods\n", drv->name);
other = driver_find(drv->name, drv->bus);
if (other) {
printk(KERN_ERR "Error: Driver '%s' is already registered, "
"aborting...\n", drv->name);
return -EBUSY;
}
ret = bus_add_driver(drv);
if (ret)
return ret;
ret = driver_add_groups(drv, drv->groups);
if (ret)
bus_remove_driver(drv);
return ret;
}
EXPORT_SYMBOL_GPL(driver_register);
下面來看一下bus_add_driver函數,這個函數位於linux-3.4\drivers\base\bus.c中:
/**
* bus_add_driver - Add a driver to the bus.
* @drv: driver.
*/
int bus_add_driver(struct device_driver *drv)
{
struct bus_type *bus;
struct driver_private *priv;
int error = 0;
bus = bus_get(drv->bus);
if (!bus)
return -EINVAL;
pr_debug("bus: '%s': add driver %s\n", bus->name, drv->name);
priv = kzalloc(sizeof(*priv), GFP_KERNEL);
if (!priv) {
error = -ENOMEM;
goto out_put_bus;
}
klist_init(&priv->klist_devices, NULL, NULL);
priv->driver = drv;
drv->p = priv;
priv->kobj.kset = bus->p->drivers_kset;
error = kobject_init_and_add(&priv->kobj, &driver_ktype, NULL,
"%s", drv->name);
if (error)
goto out_unregister;
if (drv->bus->p->drivers_autoprobe) {
error = driver_attach(drv);
if (error)
goto out_unregister;
}
klist_add_tail(&priv->knode_bus, &bus->p->klist_drivers);
module_add_driver(drv->owner, drv);
error = driver_create_file(drv, &driver_attr_uevent);
if (error) {
printk(KERN_ERR "%s: uevent attr (%s) failed\n",
__func__, drv->name);
}
error = driver_add_attrs(bus, drv);
if (error) {
/* How the hell do we get out of this pickle? Give up */
printk(KERN_ERR "%s: driver_add_attrs(%s) failed\n",
__func__, drv->name);
}
if (!drv->suppress_bind_attrs) {
error = add_bind_files(drv);
if (error) {
/* Ditto */
printk(KERN_ERR "%s: add_bind_files(%s) failed\n",
__func__, drv->name);
}
}
kobject_uevent(&priv->kobj, KOBJ_ADD);
return 0;
out_unregister:
kobject_put(&priv->kobj);
kfree(drv->p);
drv->p = NULL;
out_put_bus:
bus_put(bus);
return error;
}
從上面的紅線部分,如果驅動是自動probe的話,將調用driver_attach來綁定設備和驅動。函數driver_attach位於linux-3.4\drivers\base\dd.c中:
/**
* driver_attach - try to bind driver to devices.
* @drv: driver.
*
* Walk the list of devices that the bus has on it and try to
* match the driver with each one. If driver_probe_device()
* returns 0 and the @dev->driver is set, we've found a
* compatible pair.
*/
int driver_attach(struct device_driver *drv)
{
return bus_for_each_dev(drv->bus, NULL, drv, __driver_attach);
}
EXPORT_SYMBOL_GPL(driver_attach);
/**
* bus_for_each_dev - device iterator.
* @bus: bus type.
* @start: device to start iterating from.
* @data: data for the callback.
* @fn: function to be called for each device.
*
* Iterate over @bus's list of devices, and call @fn for each,
* passing it @data. If @start is not NULL, we use that device to
* begin iterating from.
*
* We check the return of @fn each time. If it returns anything
* other than 0, we break out and return that value.
*
* NOTE: The device that returns a non-zero value is not retained
* in any way, nor is its refcount incremented. If the caller needs
* to retain this data, it should do so, and increment the reference
* count in the supplied callback.
*/
int bus_for_each_dev(struct bus_type *bus, struct device *start,
void *data, int (*fn)(struct device *, void *))
{
struct klist_iter i;
struct device *dev;
int error = 0;
if (!bus || !bus->p)
return -EINVAL;
klist_iter_init_node(&bus->p->klist_devices, &i,
(start ? &start->p->knode_bus : NULL));
while ((dev = next_device(&i)) && !error)
error = fn(dev, data);
klist_iter_exit(&i);
return error;
}
EXPORT_SYMBOL_GPL(bus_for_each_dev);
static int __driver_attach(struct device *dev, void *data)
{
struct device_driver *drv = data;
/*
* Lock device and try to bind to it. We drop the error
* here and always return 0, because we need to keep trying
* to bind to devices and some drivers will return an error
* simply if it didn't support the device.
*
* driver_probe_device() will spit a warning if there
* is an error.
*/
if (!driver_match_device(drv, dev))
return 0;
if (dev->parent) /* Needed for USB */
device_lock(dev->parent);
device_lock(dev);
if (!dev->driver)
driver_probe_device(drv, dev);
device_unlock(dev);
if (dev->parent)
device_unlock(dev->parent);
return 0;
}
這裡首先是driver 匹配device,然後調用了driver_probe_device函數,該函數位於linux-3.4\drivers\base\dd.c中:
/**
* driver_probe_device - attempt to bind device & driver together
* @drv: driver to bind a device to
* @dev: device to try to bind to the driver
*
* This function returns -ENODEV if the device is not registered,
* 1 if the device is bound successfully and 0 otherwise.
*
* This function must be called with @dev lock held. When called for a
* USB interface, @dev->parent lock must be held as well.
*/
int driver_probe_device(struct device_driver *drv, struct device *dev)
{
int ret = 0;
if (!device_is_registered(dev))
return -ENODEV;
pr_debug("bus: '%s': %s: matched device %s with driver %s\n",
drv->bus->name, __func__, dev_name(dev), drv->name);
pm_runtime_get_noresume(dev);
pm_runtime_barrier(dev);
ret = really_probe(dev, drv);
pm_runtime_put_sync(dev);
return ret;
}
static int really_probe(struct device *dev, struct device_driver *drv)
{
int ret = 0;
atomic_inc(&probe_count);
pr_debug("bus: '%s': %s: probing driver %s with device %s\n",
drv->bus->name, __func__, drv->name, dev_name(dev));
WARN_ON(!list_empty(&dev->devres_head));
dev->driver = drv;
if (driver_sysfs_add(dev)) {
printk(KERN_ERR "%s: driver_sysfs_add(%s) failed\n",
__func__, dev_name(dev));
goto probe_failed;
}
if (dev->bus->probe) {
ret = dev->bus->probe(dev);
if (ret)
goto probe_failed;
} else if (drv->probe) {
ret = drv->probe(dev);
if (ret)
goto probe_failed;
}
driver_bound(dev);
ret = 1;
pr_debug("bus: '%s': %s: bound device %s to driver %s\n",
drv->bus->name, __func__, dev_name(dev), drv->name);
goto done;
probe_failed:
devres_release_all(dev);
driver_sysfs_remove(dev);
dev->driver = NULL;
if (ret == -EPROBE_DEFER) {
/* Driver requested deferred probing */
dev_info(dev, "Driver %s requests probe deferral\n", drv->name);
driver_deferred_probe_add(dev);
} else if (ret != -ENODEV && ret != -ENXIO) {
/* driver matched but the probe failed */
printk(KERN_WARNING
"%s: probe of %s failed with error %d\n",
drv->name, dev_name(dev), ret);
} else {
pr_debug("%s: probe of %s rejects match %d\n",
drv->name, dev_name(dev), ret);
}
/*
* Ignore errors returned by ->probe so that the next driver can try
* its luck.
*/
ret = 0;
done:
atomic_dec(&probe_count);
wake_up(&probe_waitqueue);
return ret;
}
//led_probe
static int __devinit led_probe(struct platform_device *pdev)
{
int led_used;
script_item_u val;
script_item_value_type_e type;
int err;
printk("led_para!\n");
type = script_get_item("led_para", "led_used", &val);
if (SCIRPT_ITEM_VALUE_TYPE_INT != type) {
printk("%s script_get_item \"led_para\" led_used = %d\n",
__FUNCTION__, val.val);
return -1;
}
led_used = val.val;
printk("%s script_get_item \"led_para\" led_used = %d\n",
__FUNCTION__, val.val);
if(!led_used) {
printk("%s led_used is not used in config, led_used=%d\n", __FUNCTION__,led_used);
return -1;
}
err = led_gpio();
if (err)
return -1;
sema_init(&lock, 1);
err = misc_register(&leds_dev);
printk("======= cqa83 led initialized ================\n");
return err;
}
到這裡,platform設備的設備和驅動初始化和綁定,探測就結束了,其實也意味著驅動已經設備和注冊成功了。
我覺得有一點還是要說一下,那就是設備和驅動的匹配,在驅動注冊是會回調總線注冊的匹配函數platform_match,該函數位於linux-3.4\drivers\base\platform.c中:
/** * platform_match - bind platform device to platform driver. * @dev: device. * @drv: driver. * * Platform device IDs are assumed to be encoded like this: * "", where is a short description of the type of * device, like "pci" or "floppy", and is the enumerated * instance of the device, like '0' or '42'. Driver IDs are simply * " ". So, extract the from the platform_device structure, * and compare it against the name of the driver. Return whether they match * or not. */ static int platform_match(struct device *dev, struct device_driver *drv) { struct platform_device *pdev = to_platform_device(dev); struct platform_driver *pdrv = to_platform_driver(drv); /* Attempt an OF style match first */ if (of_driver_match_device(dev, drv)) return 1; /* Then try to match against the id table */ if (pdrv->id_table) return platform_match_id(pdrv->id_table, pdev) != NULL; /* fall-back to driver name match */ return (strcmp(pdev->name, drv->name) == 0); }
在這裡簡單總結一下,platform設備加載驅動的過程。首先有一個platform總線,這個總線呢會在系統初始化的時候對其進行初始化。在總線初始化完成之後,如果你想要往總線上掛載platform設備,那麼這個要分為兩部分,一是設備,二是驅動,也即是片platform_device和platform_driver,這兩個都是要掛載到platform總線上。但是掛載有一個順序,一定要先掛載設備,再掛載驅動,因為驅動是遍歷總線上所有的設備節點來匹配的。那麼這倆東西靠什麼來匹配呢?他們靠的是其結構體下的name成員變量,如果名字一樣才能匹配成功,這也就是為什麼要求platform_device和platform_driver的名字要一樣的原因了。
platform_device結構體提供的是資源,而platform_driver結構體提供的是操作,也就是驅動操作設備。platform_driver主要完成了設備的注冊和初始化,還有移除是的資源釋放等。在驅動led.c中很容易可以看出來,led_probe調用了led_gpio函數。到platform設備驅動加載完成,其實是在目錄/dev/platform下會出現你的設備。然而這並不能做什麼,但是Linux裡有一句話“一切皆文件”,設備也是文件。那麼這些完成之後,下面就是文件操作了。
一個問題是,我們的應用程序如何去使用驅動程序中的函數?比如打開設備,關閉設備,使用設備等等。這裡就是說對應用程序來說需要一個入口,一個可以通過驅動程序控制設備的入口。這裡就引入了一個重要的數據結構file_operrations,這個結構體包含了一組函數指針,這些指針所指向的函數就是用來操作設備的。
這個結構體位於linux-3.4\include\linux\fs.h中:
struct file_operations {
struct module *owner;
loff_t (*llseek) (struct file *, loff_t, int);
ssize_t (*read) (struct file *, char __user *, size_t, loff_t *);
ssize_t (*write) (struct file *, const char __user *, size_t, loff_t *);
ssize_t (*aio_read) (struct kiocb *, const struct iovec *, unsigned long, loff_t);
ssize_t (*aio_write) (struct kiocb *, const struct iovec *, unsigned long, loff_t);
int (*readdir) (struct file *, void *, filldir_t);
unsigned int (*poll) (struct file *, struct poll_table_struct *);
long (*unlocked_ioctl) (struct file *, unsigned int, unsigned long);
long (*compat_ioctl) (struct file *, unsigned int, unsigned long);
int (*mmap) (struct file *, struct vm_area_struct *);
int (*open) (struct inode *, struct file *);
int (*flush) (struct file *, fl_owner_t id);
int (*release) (struct inode *, struct file *);
int (*fsync) (struct file *, loff_t, loff_t, int datasync);
int (*aio_fsync) (struct kiocb *, int datasync);
int (*fasync) (int, struct file *, int);
int (*lock) (struct file *, int, struct file_lock *);
ssize_t (*sendpage) (struct file *, struct page *, int, size_t, loff_t *, int);
unsigned long (*get_unmapped_area)(struct file *, unsigned long, unsigned long, unsigned long, unsigned long);
int (*check_flags)(int);
int (*flock) (struct file *, int, struct file_lock *);
ssize_t (*splice_write)(struct pipe_inode_info *, struct file *, loff_t *, size_t, unsigned int);
ssize_t (*splice_read)(struct file *, loff_t *, struct pipe_inode_info *, size_t, unsigned int);
int (*setlease)(struct file *, long, struct file_lock **);
long (*fallocate)(struct file *file, int mode, loff_t offset,
loff_t len);
};
//file_operations
static struct file_operations leds_ops = {
.owner = THIS_MODULE,
.open = led_open,
.release = led_close,
.unlocked_ioctl = led_ioctl,
};
這裡只定義了open函數,release函數,unlocked_ioctl函數,並且定義了其擁有者是THIS_MODULE。這幾個函數的源代碼分別是:
//led_open
static int led_open(struct inode *inode, struct file *file)
{
if (!down_trylock(&lock))
return 0;
else
return -EBUSY;
}
led_open函數是開始時對設備加鎖,防止多應用程序訪問。
//led_close
static int led_close(struct inode *inode, struct file *file)
{
up(&lock);
return 0;
}
led_close函數是設備使用完之後對設備進行解鎖方便其他程序使用。
//led_ioctl
static long led_ioctl(struct file *filep, unsigned int cmd,
unsigned long arg)
{
unsigned int n;
n = (unsigned int)arg;
switch (cmd) {
case LED_IOCTL_SET_ON:
if (n < 1)
return -EINVAL;
if(led_val[n-1].gpio.gpio != -1) {
__gpio_set_value(led_val[n-1].gpio.gpio, 1);
printk("led%d on !\n", n);
}
break;
case LED_IOCTL_SET_OFF:
default:
if (n < 1)
return -EINVAL;
if(led_val[n-1].gpio.gpio != -1) {
__gpio_set_value(led_val[n-1].gpio.gpio, 0);
printk("led%d off !\n", n);
}
break;
}
return 0;
}
到此呢,驅動也加載了,應用程序也有了入口,但是還有一個重要問題沒有說,那就是它是何時加載到驅動的呢?
我們知道Linux系統驅動加載一般是兩種方式,一個是編譯成ko模塊加載,一個是編譯進內核,系統啟動時自動加載。模塊加載有兩種方式,一個是手動加載,一個是使用腳本在系統啟動時加載,但是這兩種方式都會使用到mknod,insmod命令等。
那麼這裡是怎麼加載的呢?我們先查看其系統啟動的配置文件init.sun8i.rc,裡面關於led的啟動設置是這樣的
# led
chmod 777 /dev/led
而不像lcd,lcd是這樣的:
# lcd
insmod /system/vendor/modules/disp.ko
insmod /system/vendor/modules/hdmi.ko
然而其關於led的只有:
obj-$(CONFIG_SUNXI_LED) += led.o
其實我們再回到led.c代碼中的led_probe函數:
//led_probe
static int __devinit led_probe(struct platform_device *pdev)
{
int led_used;
script_item_u val;
script_item_value_type_e type;
int err;
printk("led_para!\n");
type = script_get_item("led_para", "led_used", &val);
if (SCIRPT_ITEM_VALUE_TYPE_INT != type) {
printk("%s script_get_item \"led_para\" led_used = %d\n",
__FUNCTION__, val.val);
return -1;
}
led_used = val.val;
printk("%s script_get_item \"led_para\" led_used = %d\n",
__FUNCTION__, val.val);
if(!led_used) {
printk("%s led_used is not used in config, led_used=%d\n", __FUNCTION__,led_used);
return -1;
}
err = led_gpio();
if (err)
return -1;
sema_init(&lock, 1);
err = misc_register(&leds_dev);
printk("======= cqa83 led initialized ================\n");
return err;
}
//miscdevice
static struct miscdevice leds_dev = {
.minor = MISC_DYNAMIC_MINOR,
.name = "led",
.fops = &leds_ops,
};
這個led設備驅動呢是一個雜項字符驅動,這就是我開始說的那三點中的一點。那這個有什麼關系呢?
misc_device是特殊字符設備。注冊驅動程序時采用misc_register函數注冊,此函數中會自動創建設備節點,即設備文件。無需mknod指令創建設備文件。
因為misc_register()會調用class_device_creat或者device_creat().
關於雜項字符設備網上有很多資料,大家可以查一下。我會在後面的博文中寫一篇來說雜項字符設備。
到這裡我們解決了沒有mknod的疑問,但是我們是如何配置才能把驅動編譯進內核呢?
可以這樣做,在內核源代碼目錄下執行make menuconfig命令,這會彈出一個對話界面。找到對應的驅動,然後用空格把前面的尖括號裡變為*號,然後保存退出。編譯系統就可以了。由於我的電腦不能截屏,就不能給大家上圖了,抱歉。不過網上有很多資料。我下面會給出連接。
到這裡這個驅動的分析基本上就完成了。但是還有倆問題需要另外來寫一下,一個是LinuxGPIO驅動模型,一個是雜項字符設備。
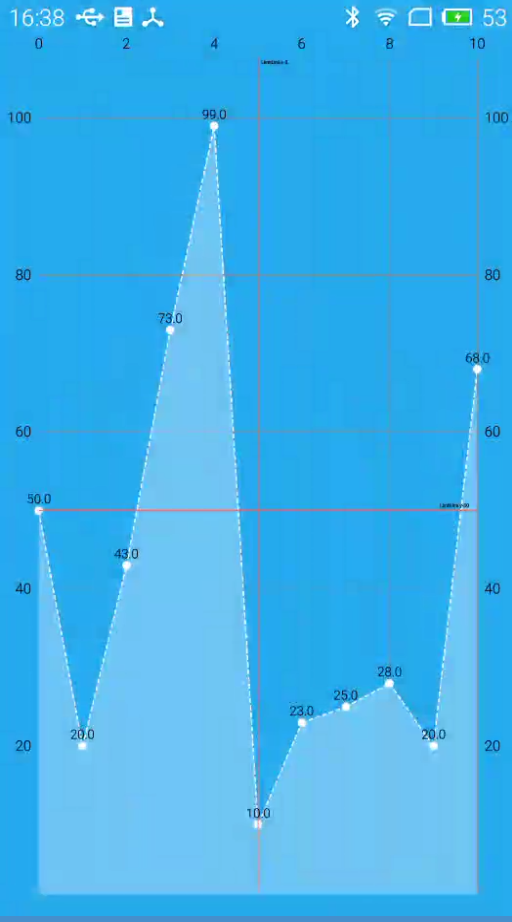
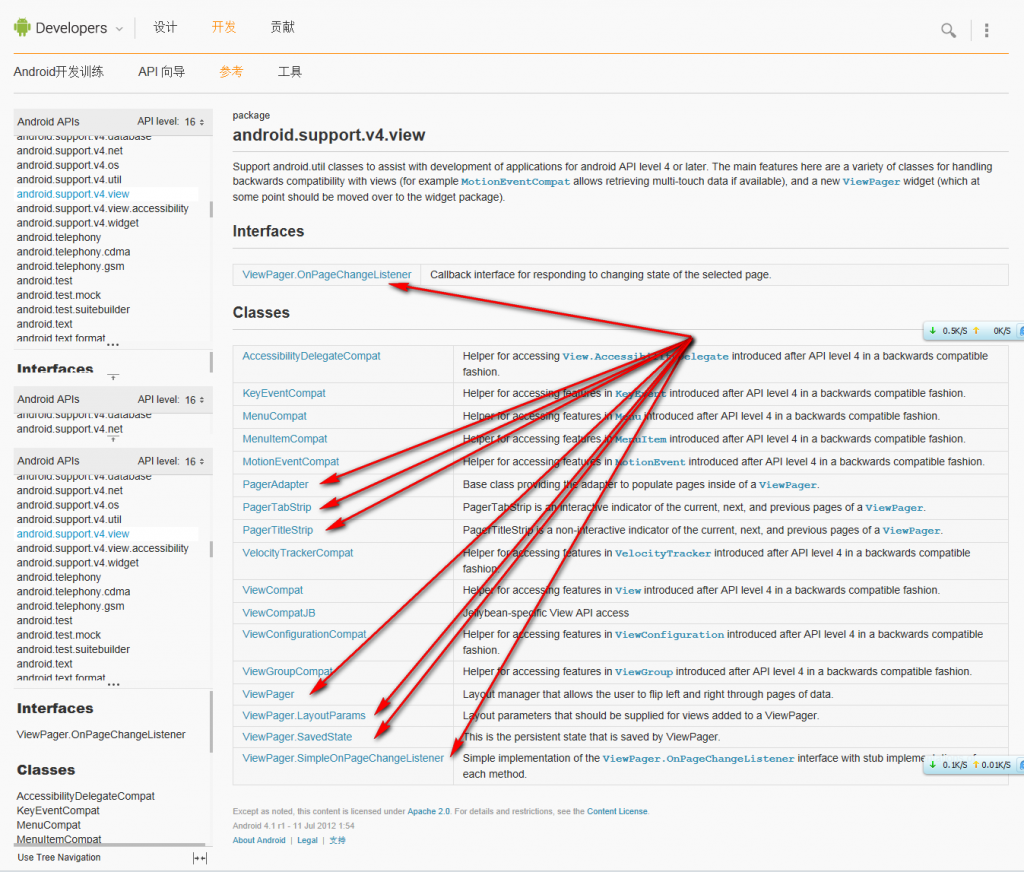 Android ViewPager使用詳解
Android ViewPager使用詳解
這是谷歌官方給我們提供的一個兼容低版本安卓設備的軟件包,裡面包囊了只有在安卓3.0以上可以使用的api。而viewpager就是其中之一利用它,我們可以做很多事情,從最簡
 小米miui8下載 miui8系統全系列機型下載地址大全
小米miui8下載 miui8系統全系列機型下載地址大全
MIUI 8是2016年5月10日小米科技發布的全新MIUI 8手機操作系統。小米公司官方此次推出的全新MIUI8系統,在各個方面都進行了大深度的優化。米迷
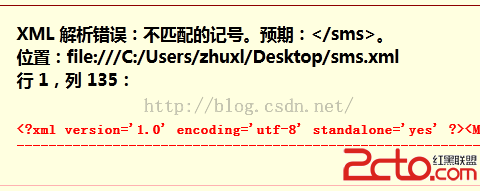 Android 存儲學習之保存系統短信到SD卡(使用XML序列化器)
Android 存儲學習之保存系統短信到SD卡(使用XML序列化器)
上節中我們是手動拼接xml文件,但是上節中那樣的做法會有一個問題,比如: //插入消息的內容sBuffer.append(); sBuffer.append(s
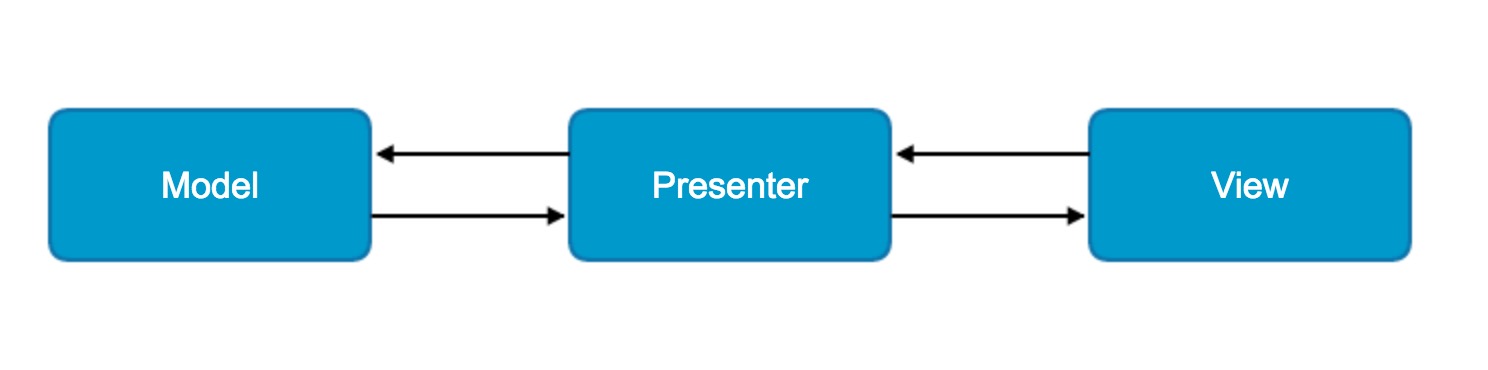 淺談Android官方MVP架構解讀
淺談Android官方MVP架構解讀
綜述對於MVP (Model View Presenter)架構是從著名的MVC(Model View Controller)架構演變而來的。而對於Android應用的開