編輯:關於Android編程
本文參考《Android系統源代碼情景分析》,作者羅升陽
一、service manager代碼:
~/Android/frameworks/base/cmd/servicemanager ----binder.c ----service_manager.c ----binder.h
驅動層代碼:
~/Android//kernel/goldfish/drivers/staging/android
----binder.c
----binder.h
二、源碼分析
從Android Binder進程間通信---注冊Service組件---Server處理BC_TRANSACTIONhttp://blog.csdn.net/jltxgcy/article/details/26151113,我們已經知道Service Manager成功地將一個Service組件注冊到內部的Service組件列表所svclist中之後,接著就會調用函數binder_send_reply將Service組件注冊結果返回給Binder驅動程序,Binder驅動程序再將該結果返回給請求注冊Service組件的進程。
~/Android/frameworks/base/cmd/servicemanager
----binder.c
void binder_send_reply(struct binder_state *bs,
struct binder_io *reply,
void *buffer_to_free,
int status) //status為0,注冊成功代碼0寫入binder_io結構體reply中
{
struct {
uint32_t cmd_free;
void *buffer;
uint32_t cmd_reply;
struct binder_txn txn;
} __attribute__((packed)) data;
data.cmd_free = BC_FREE_BUFFER;//BC_FREE_BUFFER後面跟的通信數據是一個內核緩沖區的用戶空間地址
data.buffer = buffer_to_free;//一個用戶空間地址,指向一塊用來傳輸進程間通信數據的內核緩沖區
data.cmd_reply = BC_REPLY;//BC_REPLY後面跟的通信數據是一個binder_transaction_data結構體,即一個binder_txn結構體
data.txn.target = 0;
data.txn.cookie = 0;
data.txn.code = 0;
if (status) {//status為0
data.txn.flags = TF_STATUS_CODE;
data.txn.data_size = sizeof(int);
data.txn.offs_size = 0;
data.txn.data = &status;
data.txn.offs = 0;
} else {
data.txn.flags = 0;
data.txn.data_size = reply->data - reply->data0;//0的大小,因為做為do_add_service成功,reply結構體放入0
data.txn.offs_size = ((char*) reply->offs) - ((char*) reply->offs0);//0
data.txn.data = reply->data0;//指向了0
data.txn.offs = reply->offs0;//無
}
binder_write(bs, &data, sizeof(data));
} 首先定義了一個匿名結構體data,用來描述一個BC_FREE_BUFFER和一個BC_REPLY命令協議,分別用成員變量cmd_free和cmd_reply來表示。命令協議BC_FREE_BUFFER後面跟的通信數據是一個內核緩沖區的用戶空間地址,它就保存在成員變量buffer中;而命令協議BC_REPLY後面跟的通信數據是一個binder_transaction_data結構體,即一個binder_txn結構體,它就保存在成員變量txn中。
然後調用binder_write將匿名結構體data中BC_FREE_BUFFER和BC_REPLY命令協議發送給Binder驅動程序。實現如下:
~/Android/frameworks/base/cmd/servicemanager
----binder.c
int binder_write(struct binder_state *bs, void *data, unsigned len)
{
struct binder_write_read bwr;
int res;
bwr.write_size = len;
bwr.write_consumed = 0;
bwr.write_buffer = (unsigned) data;//匿名結構體data指針
bwr.read_size = 0;
bwr.read_consumed = 0;
bwr.read_buffer = 0;
res = ioctl(bs->fd, BINDER_WRITE_READ, &bwr);
if (res < 0) {
fprintf(stderr,"binder_write: ioctl failed (%s)\n",
strerror(errno));
}
return res;
} 函數binder_write是通過IO控制命令BINDER_WRITE_READ來將BC_FREE_BUFFER和BC_REPLY命令協議發送給Binder驅動程序的,映射到驅動程序binder_thread_write。~/Android//kernel/goldfish/drivers/staging/android
----binder.c
int
binder_thread_write(struct binder_proc *proc, struct binder_thread *thread,
void __user *buffer, int size, signed long *consumed)
{
uint32_t cmd;
void __user *ptr = buffer + *consumed;
void __user *end = buffer + size;
while (ptr < end && thread->return_error == BR_OK) {
if (get_user(cmd, (uint32_t __user *)ptr))
return -EFAULT;
ptr += sizeof(uint32_t);
......
case BC_TRANSACTION:
case BC_REPLY: {
struct binder_transaction_data tr;
if (copy_from_user(&tr, ptr, sizeof(tr)))//上面剛提到的binder_txn結構體data.txn
return -EFAULT;
ptr += sizeof(tr);
binder_transaction(proc, thread, &tr, cmd == BC_REPLY);//tr為上面已經賦值的data.txn
break;
}
........
default:
printk(KERN_ERR "binder: %d:%d unknown command %d\n", proc->pid, thread->pid, cmd);
return -EINVAL;
}
*consumed = ptr - buffer;
}
return 0;
} 我們暫時不分析BC_FREE_BUFFER命令,只分析BC_REPLY,while第二次循環會執行到這裡。~/Android//kernel/goldfish/drivers/staging/android
----binder.c
static void
binder_transaction(struct binder_proc *proc, struct binder_thread *thread,
struct binder_transaction_data *tr, int reply)
{
struct binder_transaction *t;
struct binder_work *tcomplete;
......
struct binder_proc *target_proc;
struct binder_thread *target_thread = NULL;
struct binder_node *target_node = NULL;
struct list_head *target_list;
wait_queue_head_t *target_wait;
struct binder_transaction *in_reply_to = NULL;
........
uint32_t return_error;
........
if (reply) {
in_reply_to = thread->transaction_stack;//首先從線程thread的事務堆棧中將該binder_transaction結構體取出來,並且保存在變量in_reply_to中
if (in_reply_to == NULL) {
......
return_error = BR_FAILED_REPLY;
goto err_empty_call_stack;
}
binder_set_nice(in_reply_to->saved_priority);
if (in_reply_to->to_thread != thread) {
........
return_error = BR_FAILED_REPLY;
in_reply_to = NULL;
goto err_bad_call_stack;
}
thread->transaction_stack = in_reply_to->to_parent;
target_thread = in_reply_to->from;
if (target_thread == NULL) {
return_error = BR_DEAD_REPLY;
goto err_dead_binder;
}
if (target_thread->transaction_stack != in_reply_to) {
.........
return_error = BR_FAILED_REPLY;
in_reply_to = NULL;
target_thread = NULL;
goto err_dead_binder;
}
target_proc = target_thread->proc;//找到了目標進程
} else {
........
}
if (target_thread) {
.........
target_list = &target_thread->todo;//分別將它的todo隊列和wait等待隊列作為目標todo隊列target_list和目標wait等待隊列target_wait
target_wait = &target_thread->wait;//分別將它的todo隊列和wait等待隊列作為目標todo隊列target_list和目標wait等待隊列target_wait
} else {
.........
}
.........
/* TODO: reuse incoming transaction for reply */
t = kzalloc(sizeof(*t), GFP_KERNEL);//分配了binder_transaction結構體
........
tcomplete = kzalloc(sizeof(*tcomplete), GFP_KERNEL);//分配了binder_work結構體
if (tcomplete == NULL) {
return_error = BR_FAILED_REPLY;
goto err_alloc_tcomplete_failed;
}
.......
if (!reply && !(tr->flags & TF_ONE_WAY))
t->from = thread;//service_manager的主線程
else
t->from = NULL;
t->sender_euid = proc->tsk->cred->euid;//service_manager進程號
t->to_proc = target_proc;//目標進程
t->to_thread = target_thread;//目標線程
t->code = tr->code;//0
t->flags = tr->flags;//0
t->priority = task_nice(current);
t->buffer = binder_alloc_buf(target_proc, tr->data_size,
tr->offsets_size, !reply && (t->flags & TF_ONE_WAY));//分配了binder_buffer結構體
if (t->buffer == NULL) {
return_error = BR_FAILED_REPLY;
goto err_binder_alloc_buf_failed;
}
t->buffer->allow_user_free = 0;//不允許釋放
.......
t->buffer->transaction = t;
t->buffer->target_node = target_node;//NULL
if (target_node)
binder_inc_node(target_node, 1, 0, NULL);//增加目標Binder實體對象的強引用計數
offp = (size_t *)(t->buffer->data + ALIGN(tr->data_size, sizeof(void *)));//偏移數組在data中起始位置,位於數據緩沖區之後
if (copy_from_user(t->buffer->data, tr->data.ptr.buffer, tr->data_size)) {//數據緩沖區拷貝到data中
binder_user_error("binder: %d:%d got transaction with invalid "
"data ptr\n", proc->pid, thread->pid);
return_error = BR_FAILED_REPLY;
goto err_copy_data_failed;
}
if (copy_from_user(offp, tr->data.ptr.offsets, tr->offsets_size)) {//偏移數組拷貝到data中,偏移數組位於數據緩沖區之後
binder_user_error("binder: %d:%d got transaction with invalid "
"offsets ptr\n", proc->pid, thread->pid);
return_error = BR_FAILED_REPLY;
goto err_copy_data_failed;
}
if (!IS_ALIGNED(tr->offsets_size, sizeof(size_t))) {
binder_user_error("binder: %d:%d got transaction with "
"invalid offsets size, %zd\n",
proc->pid, thread->pid, tr->offsets_size);
return_error = BR_FAILED_REPLY;
goto err_bad_offset;
}
off_end = (void *)offp + tr->offsets_size;
for (; offp < off_end; offp++) {//偏移數組裡面沒有內容
.....
}
if (reply) {
BUG_ON(t->buffer->async_transaction != 0);
binder_pop_transaction(target_thread, in_reply_to);//TODO
} else if (!(t->flags & TF_ONE_WAY)) {
.........
} else {
.........
}
t->work.type = BINDER_WORK_TRANSACTION;
list_add_tail(&t->work.entry, target_list);//加入到目標線程的todo
tcomplete->type = BINDER_WORK_TRANSACTION_COMPLETE;
list_add_tail(&tcomplete->entry, &thread->todo);//加入到本線程的todo
if (target_wait)
wake_up_interruptible(target_wait);//喚醒目標線程
return;
} 當Binder驅動程序分發一個進程間通信請求給一個線程處理時,就會將一個binder_transaction結構體壓入到它的事務堆棧中,因此首先從線程thread的事務堆棧中將該binder_transaction結構體取出來,並且保存在變量in_reply_to中。
binder_transaction結構體in_reply_to成員變量from指向了之前請求與thread進行進程間通信的線程,因此緊接著獲取了目標線程target_thread。
找到目標線程target_thread之後,分別將它的todo隊列和wait等待隊列作為目標todo隊列target_list和目標wait等待隊列target_wait。
然後使用初始化binder_transaction結構體t,加入到目標線程的todo。又初始化了binder_work結構體,加入到本線程(service_manager主線程)的todo隊列。最後喚醒目標線程。
我們假設本線程繼續執行,執行完畢後再執行被喚醒的目標線程。
service_manager主線程繼續執行,執行完binder_transaction,一層一層的返回,最終返回到binder_loop中,繼續執行for循環,ioctl映射到binder_ioctl,由於只有read_size大於0,所以執行binder_thread_read,實現如下:
~/Android//kernel/goldfish/drivers/staging/android
----binder.c
static int
binder_thread_read(struct binder_proc *proc, struct binder_thread *thread,
void __user *buffer, int size, signed long *consumed, int non_block)
{
void __user *ptr = buffer + *consumed;//起始位置
void __user *end = buffer + size;//結束位置
int ret = 0;
int wait_for_proc_work;
if (*consumed == 0) {
if (put_user(BR_NOOP, (uint32_t __user *)ptr))//BR_NOOP存入剛才的局部變量中
return -EFAULT;
ptr += sizeof(uint32_t);
}
retry:
wait_for_proc_work = thread->transaction_stack == NULL && list_empty(&thread->todo);//wait_for_proc_work目前為0,表示線程有要處理的任務
if (thread->return_error != BR_OK && ptr < end) {
..........
}
thread->looper |= BINDER_LOOPER_STATE_WAITING;//looper為BINDER_LOOPER_STATE_ENTERED,BINDER_LOOPER_STATE_WAITING
if (wait_for_proc_work)//為0
proc->ready_threads++;
mutex_unlock(&binder_lock);
if (wait_for_proc_work) {//為0
........
} else {
if (non_block) {//非阻塞要立刻返回處理結果
if (!binder_has_thread_work(thread))有任務就接下往下執行,沒有任務就返回
ret = -EAGAIN;
} else
ret = wait_event_interruptible(thread->wait, binder_has_thread_work(thread));//有任務不睡眠,繼續往下執行
}
mutex_lock(&binder_lock);
if (wait_for_proc_work)//為0
proc->ready_threads--;
thread->looper &= ~BINDER_LOOPER_STATE_WAITING;//looper為BINDER_LOOPER_STATE_ENTERED
if (ret)
return ret;
while (1) {
case BINDER_WORK_TRANSACTION_COMPLETE: {
cmd = BR_TRANSACTION_COMPLETE;
if (put_user(cmd, (uint32_t __user *)ptr))//將一個BR_TRANSACTION_COMPLETE返回協議寫入到用戶提供的緩沖區。
return -EFAULT;
ptr += sizeof(uint32_t);
binder_stat_br(proc, thread, cmd);
if (binder_debug_mask & BINDER_DEBUG_TRANSACTION_COMPLETE)
printk(KERN_INFO "binder: %d:%d BR_TRANSACTION_COMPLETE\n",
proc->pid, thread->pid);
list_del(&w->entry);//刪除todo上的工作項
kfree(w);//釋放結構體
binder_stats.obj_deleted[BINDER_STAT_TRANSACTION_COMPLETE]++;
} break;
}
done:
*consumed = ptr - buffer;//消耗的大小
..........
return 0;
}
~/Android/frameworks/base/cmd/servicemanager
----binder.c
int binder_parse(struct binder_state *bs, struct binder_io *bio,
uint32_t *ptr, uint32_t size, binder_handler func)//ptr為BR_TRANSACTION_COMPLETE的指針,size為它的大小
{
int r = 1;
uint32_t *end = ptr + (size / 4);
while (ptr < end) {
uint32_t cmd = *ptr++;
.......
switch(cmd) {//cmd為BR_TRANSACTION_COMPLETE
......
case BR_TRANSACTION_COMPLETE:
break;
......}
}
return r;
}
執行完binder_parse後,繼續執行binder_loop的for循環,又一次睡眠等待直到其所屬的進程有新的未處理項為止,停留在下面的代碼:
wait_event_interruptible_exclusive(proc->wait, binder_has_proc_work(proc, thread));//睡眠等待直到其所屬的進程有新的未處理項為止
 快速解決Android平台移植ffmpeg的一些問題
快速解決Android平台移植ffmpeg的一些問題
IT行業是一個踩在巨人肩膀上前進的行業,否則做的事情不一定有意義,所以我也是基於havlenapetr移植的ffmpeg基礎上做了些改進,他做的主要貢獻有:1. 移植了f
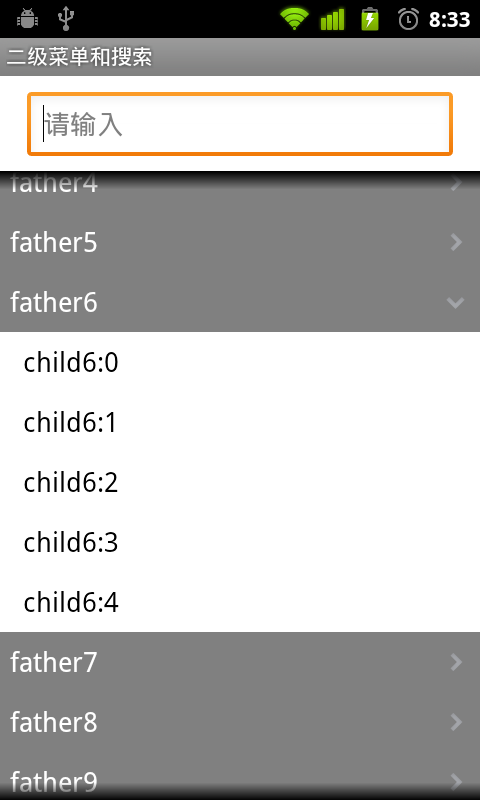 Android編程實現二級下拉菜單及快速搜索的方法
Android編程實現二級下拉菜單及快速搜索的方法
本文實例講述了Android編程實現二級下拉菜單及快速搜索的方法。分享給大家供大家參考,具體如下:一、我們要做什麼?上面有個搜索框,下面是一個二級下拉菜單。輸入查詢內容,
 WoWoViewPager動畫庫
WoWoViewPager動畫庫
目錄English READMEGradle備注Demo版本TodoLicense動畫用法基本動畫位移動畫縮放動畫漸現、漸逝動畫旋轉動畫文字大小動畫TextView Si
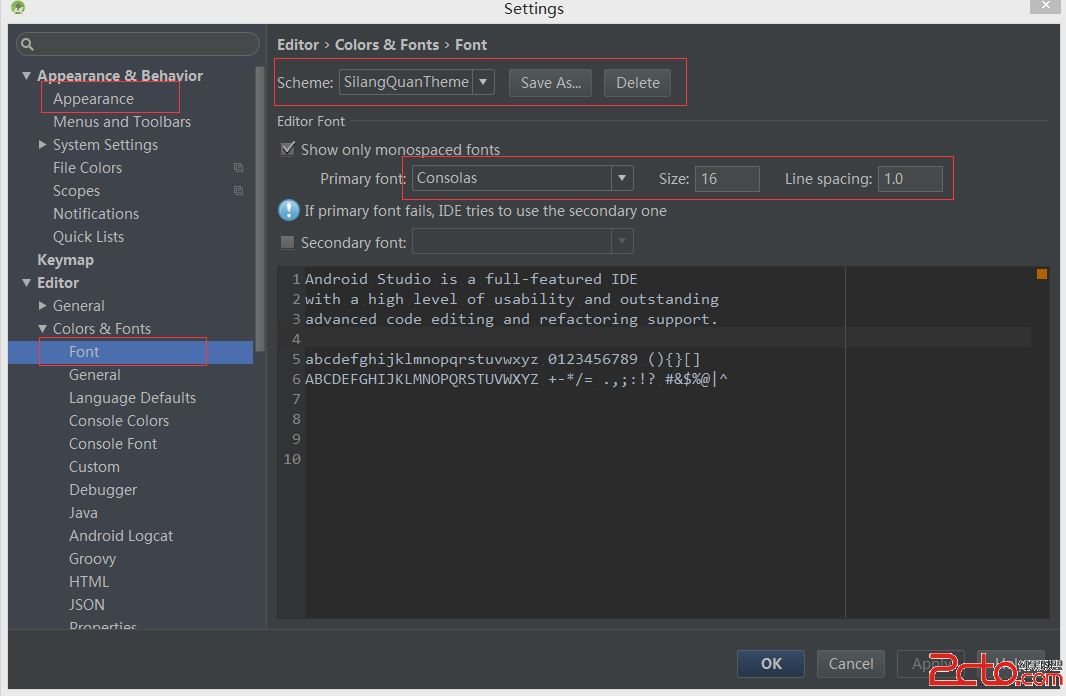 Android Studio 初探
Android Studio 初探
Android Studio 簡介Android Studio 是Google近年來推薦的Android開發IDE,相對於Eclipse,它針對Android開發做了各種




